
Platforma Operasyona Hewayî ya Scissor GTJZ1012





I. Nêrîn û taybetmendiyên hilberê
Platforma xebata hewayî ya nû ya ku ji hêla XCMG ve hatî pêşve xistin xwedan bilindahiya xebatê 12 m, firehiya wesayîtê 1.17 m, barkirina binavkirî 320 kg, herî zêde heye.dirêjahiya platformê li 3,2 m û herî zêde.dereceya 25%.Ev wesayît strûktûra kompakt, performansa pêşkeftî, amûrên ewlehiyê yên qedandî, bi taybetî ji bo çêkirinê guncan e.Herwisa.Ew ji her qirêjiyê bêpar e, bi rakirina / daxistina domdar, kontrol û lênihêrîna hêsan.Ji ber vê yekê, bi vî rengî platforman bi berfirehî li wargeh, kargeh, balafirgeh, û stasyonên trênê, nemaze cihên kar ên teng, têne sepandin.
[Awantaj û taybetmendî]
● Pergala ajokera elektrîkê ya bi bandor û enerjiyê hildiweşîne û dengek kêm, digel tirên bêşop, vê makîneyê bi hêsanî kar dike ku li derdorên dorpêçkirî yên wekî avahiya nivîsgehê, nexweşxane û dibistanan bixebite û bandora li ser jîngehê kêm bike.
●Mekanîzmaya parastinê ya çalak, wekî mekanîzmaya parastinê ya kulikê û pergala kontrolkirina ewlehiyê ya xwe-pêşkeftî sêwirana însanî û vebijarkên dewlemend vedihewîne, ku hewcedariya xerîdar ji bo ewlehî, pêbawerî û hişmendiyê peyda dike.
●Platforma xebatê dikare dirêj bike, cîhê xebatê mezin bike, bi hev re bendika pêçandî veguheztinê hêsantir dike.
●"Radyoya Zivirandina Zero" bêhempa ye û makîneyê dide quncikê di jûreya teng de.
●Max.barkirina 320kg, pêşengiya pîşesaziyê dike.
● Leza herî zêde ya rêwîtiyê 3,2km/h û 25% derecebûna ajotinê hêsantir dike.
I. Nêrîn û taybetmendiyên hilberê
Platforma xebata hewayî ya XCMG GTJZ1012 gelek avantajên wekî jêrîn hene:
1. Veguhestina hêsan Û Operasyona Stable
Bin-platforma teleskopê cîhê xebatê yê mezin bi dest dixe û bi platforma pêçandî re dixebite da ku veguheztin û veguheztina hêsantir pêk bîne.Pergala parastina qulikê ya otomatîkî ya pêşeng a pîşesaziyê û sêwirana pêlava çerxa fireh dibe ku karûbarên weya belaş tewra li ser erdek hişk jî bike.
2. Xizmetên Jîngehê Truction Û Xizmeta Xweser
Ajokera elektrîkê ya paqij, berdana sifir, dengek kêm û avakirina jîngehê bêtir.Bi tevahî tepsiya celeb-swing ji bo karûbar û lênihêrînê rehet e.
3. Sêwirana Giştî Û Modular
Sêwirana modular a makîneyê gerdûnîbûna parçeyan garantî dike, tamîrkirin û domandina xerîdaran hêsantir dike, û lêçûnek pêşbaztir bi dest dixe.
II.Danasîna Parçeyên Sereke
1. Şasi
Veavakirina sereke: Rêvebiriya du-teker, ajotina 4 × 2, pergala firnê ya otomatîk, pergala parastina qulikê ya otomatîk, tîrêjên gomê yên hişk ên bê nîşankirin, berdana frena bi destan
(1) Leza ajotinê ya herî zêde 3,2 km/h e.
(2) Zêdebûna herî zêde %25 e.
(3) Kulika standard li paşiya şasiyê ji bo veguheztina qalikan
(3) Pergala parastina piyana otomatîk - ewlehiya rakirina platformê misoger dike.
(4) Tekerên gomî yên zexm ên bê rê - bargiraniya bilind, xebitandina aram û jîngehê dostane
(5) ajotina 4 × 2, çerxên zivirîn jî çerxên ajotinê ne, sê leza ajotinê, rê dide rêwîtiya tevahî.
(6) Pergala firnê ya otomatîk - dema ku rêwîtiyek rawestîne an li ser çolê raweste makîne bixweber disekine;ji bilî vê, e brake destê extra ji bo rewşa awarte hene.
2. Boom
(1) Silindirên lûfkirina ducar + pênc komikên şûşê.
(2) Pola hêza bilind - bom giraniya sivik û ewledar e.
(3) Lihevhatina hêz û hişkiyê - pêbaweriya pêbawer peyda bikin.
(4) Çarçoveya vekolînê - ewlehiya vekolînê biparêzin
3. Platforma xebatê
(1) Ji bo platforma sereke 320kg û ji bo platforma duyemîn 115kg barkirin;
(2) Dirêjahiya platforma xebatê × firehî: 2,27 m × 1,12 m;
(3) Sub-platform dikare bi yek awayê 0.9 m dirêj bike;
(4) Deriyê platformê bixwe girtî ye
(5) Nobedarên platformê yên pêçandî
4. Pergala hîdraulîk
(1) Hêmanên hîdrolîk - pompeya hîdrolîk, valahiya sereke, motora hîdrolîk û brake ji hilberînerên navdar ên navxweyî (an navneteweyî) ne
(2) Pergala hîdrolîk bi pompeya pêlavê ya motorê ve tê rêve kirin, da ku platformê bilind bike an nizm bike û platformê bimeşîne û rêve bibe.
(3) Silindera hilgirtinê bi valveyek nizmkirinê ya acîl ve hatî saz kirin - piştrast bikin ku platform dikare bi leza domdar bi paşvekişînê kêm bibe, tewra di qezayê de an qutbûna elektrîkê.
(4) Silindirê hilkişînê bi qefleya hîdrolîk ve tête peyda kirin da ku pêbaweriya hilgirtina pêbawer a platforma xebatê ya piştî şikestina çengê hîdrolîk peyda bike.
5. Pergala elektrîkê
(1) Pergala elektrîkê teknolojiya kontrola otobusê CAN bikar tîne.Şassî bi kontrolkerê ve tê stend, platform bi destikê kontrolê ve tê vegirtin û danûstendina di navbera şas û kontrolkerê platformê de bi otobusa CAN-ê ve tête kirin da ku çalakiya makîneyê kontrol bike.
(2) Teknolojiyên kontrola rêjeyî her çalakiyê domdar dike.
(3) Pergala elektrîkê hemî çalakiyan kontrol dike, di nav de rêveçûna çepê / rastê, rêwîtiya pêş / paşde, guheztina di navbera leza bilind û nizm de û rakirina / daxistina platforma xebatê.
(4) Rêbazên ewlehî û hişyariyê yên pirjimar: parastinê ya zirav;girtina destan;parastina pothole otomatîk;parastina otomatîkî ya kêm-leza li bilindahiya bilind;sekinîna sê çirkeyan;pergala hişyariya giran-barkirî (vebijarkî);pergala parastinê ya barkirinê;bişkoka acîl;dengbêja çalakiyê, fîşa frekansê, horn, demjimêr û pergala tespîtkirina xeletiyê.
III.Veavakirina Hêmanên Sereke
| S/N | Parçeyek sereke | Jimarî | Nîşan | Not |
| 1 | Controller | 1 | Hirschmann / Geliyê Bakur | |
| 2 | Pompeya sereke | 1 | Sant/Bucher | |
| 3 | Motora hîdrolîk | 2 | Danfoss | |
| 4 | Brake hîdrolîk | 2 | Danfoss | |
| 5 | Yekîneya hêzê | 1 | Bucher/GERI | |
| 6 | Silindirê derrik | 1 | XCMG beşa hîdrolîk / Dacheng / Shengbang / Diaojiang | |
| 7 | Silindirê rêvekirinê | 1 | ||
| 8 | Pîl | 4 | Trojan/Leoch | |
| 9 | Charger | 1 | GPD | |
| 10 | Guhestina sînor | 2 | Honeywell / CNTD | |
| 11 | Guhestina ceribandinê | 2 | Honeywell / CNTD | |
| 12 | ajotina motorê | 1 | Curtis | |
| 13 | Dûlab | 4 | Exmile / Power | |
| 14 | Sensorê goşeyê | 1 | Honeywell | Bixwe |
| 15 | Sensorê zextê | 1 | danfoss | Bixwe |
IV.Tabloya Parametreyên Teknîkî yên Sereke
| Şanî | Yekbûn | Parametre | Toleransa destûr | |
| Mezinahiya makîneyê | Dirêjahî (bê nêrdewan) | mm | 2485 (2285) | ± 0,5 % |
| Berî | mm | 1170 | ||
| Bilindahî (platforma pêçayî) | mm | 2472 (1908) | ||
| Wheelbase | mm | 1876 | ± 0,5 % | |
| Wheel track | mm | 1043 | ± 0,5 % | |
| Kêmtirîn paqijiya erdê (Parêzkarê Pit hildikişe / dadikeve) | mm | 100/20 | ± 5 % | |
| Mezinahiya platforma xebatê | Dirêjî | mm | 2276 | ± 0,5 % |
| Berî | mm | 1120 | ||
| Bilindî | mm | 1254 | ||
| Dirêjahiya dirêjkirina platforma alîkar | mm | 900 | ||
| Helwesta navendî ya makîneyê | Dûrahiya horizontî heya mîlê pêş | mm | 950 | ± 0,5 % |
| Bilindahiya navendê | mm | 663 | ||
| Girseya giştî ya makîneyê | kg | 2940 | ± 3 % | |
| Max.bilindahiya platformê | m | 10 | ± 1 % | |
| Min.bilindahiya platformê | m | 1.34 | ± 1 % | |
| Bilindahiya xebatê ya herî zêde | m | 12 | ± 1 % | |
| Radyoya zivirîna hindiktirîn (çerxa hundurîn / çerxa derve) | m | 0/2.3 | ± 1 % | |
| Barkirina binavkirî ya platforma xebatê | kg | 320 | - | |
| Payload piştî platforma xebatê hate dirêj kirin | kg | 115 | - | |
| Dema rakirina platforma xebatê | s | 50-75 | - | |
| Kêmkirina dema platforma xebatê | s | 43-65 | - | |
| Max.leza bezê li pozîsyona kêm. | km/h | ≥3.2 | - | |
| Max.leza rêwîtiyê li bilindahiya bilind | km/h | ≥0.8 | - | |
| Dereceya herî zêde | % | 25 | - | |
| Goşeya hişyariya zirav (alî / pêş û paş) | ° | 1.5/3 | ||
| Motora hilgirtin / xebitandinê | Cins | - | - | - |
| Hêza nirxandin | kW | 3.3 | - | |
| Çêker | - | - | - | |
| Pîl | Cins | - | T125/3-EV-225 | - |
| Woltî | v | 24 | - | |
| Kanîn | Ah | 240 | - | |
| Çêker | - | Trojan/Leoch | - | |
| Modelên tire | - | Bêşop û hişk /381×127 | - | |
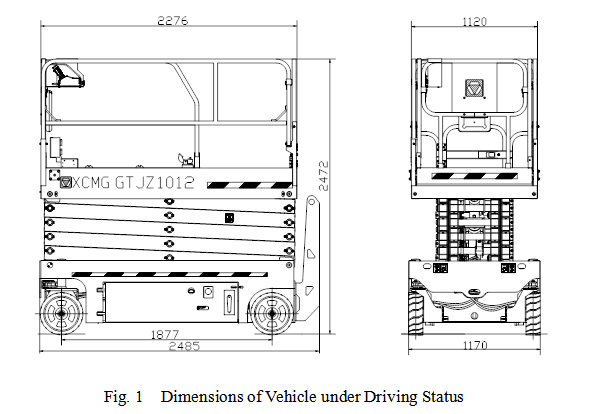
V. Dimensional Diagram of Vehicle in Running State
Pêvek: veavakirinên vebijarkî
(1) Pergala hişyariya barkirinê
(2) Çira xebatê ya platformê
(3) Bi boriya hewayê ya platforma xebatê ve girêdayî ye
(4) Bi dabînkirina hêza AC ya platforma xebatê ve girêdayî ye



