
Platforma Operasyona Hewayî ya Scissor GTJZ0607





I. Nêrîn û taybetmendiyên hilberê
Kamyona kar a hewayî ya nû ya ku ji hêla XCMG ve hatî pêşve xistin xwedan bilindahiya xebatê 7,8 m, firehiya 0,76 m, barek binavkirî 230 kg, dirêjahiya platformê ya herî zêde 2,6 m û şilbûna herî zêde 25%.Bi avahiya kompakt, performansa pêşkeftî û amûrên ewlehiyê yên bêkêmasî, kamyon bi taybetî ji bo çêkirinê maqûl e.Herwisa.Ew ji her gemarî, hilkirin û daxistinê bêkêmasî ye, kontrolkirin û domandin hêsan e.Ji ber vê yekê, ev platform bi berfirehî li wargeh, kargeh, balafirgeh û stasyonên trênê, nemaze li cîhên kar ên teng, tê bikar anîn.
[Awantaj û taybetmendî]
● Pergala ajokera elektrîkê ya bi bandor û enerjiyê hildiweşîne û dengek kêm, digel tirên bêşop, vê makîneyê bi hêsanî kar dike ku li derdorên dorpêçkirî yên wekî avahiya nivîsgehê, nexweşxane û dibistanan bixebite û bandora li ser jîngehê kêm bike.
●Mekanîzmaya parastinê ya çalak, wekî mekanîzmaya parastinê ya kulikê û pergala kontrolkirina ewlehiyê ya xwe-pêşkeftî sêwirana însanî û vebijarkên dewlemend vedihewîne, ku hewcedariya xerîdar ji bo ewlehî, pêbawerî û hişmendiyê peyda dike.
●Sêwirana strûktûra teng dihêle ku wesayîta tevahî bi hêsanî di dergehek yekane re derbas bibe;çîçeka pêçandî dikare veguheztinê hêsantir bike
●"Radyoya Zivirandina Zero" bêhempa ye û makîneyê dide quncikê di jûreya teng de.
●Max.barkirina li 230kg, pêşengiya pîşesaziyê dike.
●Lêza herî zêde ya rêwîtiyê 4km/h û 25% derecebûn ajotinê hêsantir dike.
II.Danasîna Parçeyên Sereke
1. Şasi
Veavakirinên sereke: rêvebirina du teker, ajokera 4×2, pergala frena otomatîk, pergala parastinê ya kulikê ya otomatîk, lastîkên gomîkî yên hişk ên bê şop, û berdana bi destan a frenê
(1) Leza ajotinê ya herî zêde li 4km/h.
(2) Pîvana herî zêde li 25%.
(3) Dûvê şassê ji bo veguheztina forkê bi qulika standard ve hatî stendine.
(3) Pergala parastina xweya pit-ewlekariya ji bo rakirina platformê misoger bike
(4) Tekerên gomî yên zexm ên bêşop - bargiraniya bilind, xebitandina domdar û jîngehê dostane
(5) ajotina 4×2;çerxên zivirî jî çerxên ajotinê ne;sê alavên leza ajotinê;rêveçûna hemî rêwîtiyê destûr e;
(6) Pergala frena otomatîk-- makîn dema ku rêwîtî disekine an li ser siwarekê disekine disekine;ji bilî vê, frena desta zêde ji bo rewşa awarte;
2. Boom
(1) Silindirek luffing a yekane + çar komikên pêlava celebê qermîçê
(2) Pola bi hêz-bilind - bom sivik û ewledar;
(3) Hêza hevgirtî û hişk - pê ewle bine ku bom pêbawer e.
(4) Çarçoveya teftîşkirinê - vekolînê bi ewle diparêze
3. Platforma xebatê
(1) Platforma sereke dikare bargiraniya heya 230kg û jêr-platformê heya 115kg hebe.
(2) Dirêjahiya platforma xebatê × firehî: 1,88 m × 0,76 m;
(3) Sub-platform dikare di yek alî de 0.9 m were dirêj kirin
(4) Deriyê platformê dikare bixwe-kilît bibe
(5) Parzûna platformê dikare were pêçan
4. Pergala hîdraulîk
(1) Parçeyên hîdrolîk - pompeya hîdrolîk, valahiya sereke, motora hîdrolîk û brake hemî ji hêla hilberînerên navdar ên navxweyî (an navneteweyî) ve têne çêkirin.
(2) Pergala hîdrolîk ji hêla pompeya pêlavê ya motorê ve tê rêve kirin, bi vî rengî rakirin û daxistina platformê û xebitandin û rêvekirina platformê fêm dike.
(3) Silindera hilgirtinê bi valveya daketinê ya acîl ve tête peyda kirin - da ku pê ewle bibe ku platform dikare di rewşek qezayê an têkçûna hêzê de jî bi lezek domdar dakeve paşvekêşanê.
(4) Silindirê hilgirtinê bi kilîtkirina hîdrolîk ve tête peyda kirin da ku pê ewle bibe ku platforma xebatê dikare bi pêbawerî bilindahiya xwe biparêze piştî ku qulika hîdrolîk bişkîne.
5. Pergala elektrîkê
(1) Pergala elektrîkê teknolojiya kontrola otobusê CAN qebûl dike.Şasî bi kontrolkerek û platform jî bi destikê kontrolê ve hatî çêkirin.Têkiliya di navbera şasî û kontrolkerê platformê de bi otobusa CAN ve tête kirin, da ku çalakiya makîneyê kontrol bike.
(2) Teknolojiya kontrola rêjeyî her çalakiyê aram dike.
(3) Pergala elektrîkê hemî tevgeran kontrol dike, di nav de rêwergirtina çep / rast, rêwîtiya pêş / paşîn, guheztina leza bilind / nizm û rakirina platforma xebatê.
(4) Gelek rêbazên ewlehî û hişyariyê: parastina tilt;handle interlock;parastina pothole otomatîk;parastina leza kêm otomatîk li bilindahiya bilind;rawestana daketinê ya sê saniye;pergala hişyariya barê giran (vebijarkî);pergala parastina barkirinê;bişkoka acîl;dengbêja çalakiyê, ronahiya ronahiyê ya înverter, horn, demjimêr û pergala tespîtkirina xeletiyê.
III.Veavakirina Hêmanên Sereke
| S/N | Parçeyek sereke | Jimarî | Nîşan | Not |
| 1 | Controller | 1 | Hirschmann / Geliyê Bakur | |
| 2 | Pompeya sereke | 1 | Sant/Bucher | |
| 3 | Motora hîdrolîk | 2 | Danfoss | |
| 4 | Brake hîdrolîk | 2 | Danfoss | |
| 5 | Yekîneya hêzê | 1 | Bucher/GERI | |
| 6 | Silindirê derrik | 1 | XCMG beşa hîdrolîk / Dacheng / Shengbang / Diaojiang | |
| 7 | Silindirê rêvekirinê | 1 | ||
| 8 | Pîl | 4 | Trojan/Leoch | |
| 9 | Charger | 1 | GPD | |
| 10 | Guhestina sînor | 2 | Honeywell / CNTD | |
| 11 | Guhestina ceribandinê | 2 | Honeywell / CNTD | |
| 12 | ajotina motorê | 1 | Curtis | |
| 13 | Dûlab | 4 | Exmile / Power | |
| 14 | Sensorê goşeyê | 1 | Honeywell | Bixwe |
| 15 | Sensorê zextê | 1 | danfoss | Bixwe |
IV.Tabloya Parametreyên Teknîkî yên Sereke
| Şanî | Yekbûn | Parametre | Toleransa destûr | ||
| Mezinahiya makîneyê | Dirêjahî (bê nêrdewan) | mm | 1882(1665) | ±0,5% | |
| Berî | mm | 760 | |||
| Bilindahî (platforma pêçayî) | mm | 2148(1770) | |||
| Wheelbase | mm | 1360 | ± 0,5 % | ||
| Wheel track | mm | 660 | ± 0,5 % | ||
| Kêmtirîn paqijiya erdê (Parêzkarê Pit hildikişe / dadikeve) | mm | 60/20 | ± 5 % | ||
| Mezinahiya platforma xebatê | Dirêjî | mm | 1655 | ± 0,5 % | |
| Berî | mm | 740 | |||
| Bilindî | mm | 1226 | |||
| Dirêjahiya dirêjkirina platforma alîkar | mm | 900 | |||
| Helwesta navendî ya makîneyê | Dûrahiya horizontî heya mîlê pêş | mm | 750 | ± 0,5 % | |
| Bilindahiya navendê | mm | 570 | |||
| Girseya giştî ya makîneyê | kg | 1520 | ±3% | ||
| Max.bilindahiya platformê | m | 5.8 | ± 1 % | ||
| Min.bilindahiya platformê | m | 1.01 | ± 1 % | ||
| Bilindahiya xebatê ya herî zêde | m | 7.8 | ± 1 % | ||
| Radyoya zivirîna hindiktirîn (çerxa hundurîn / çerxa derve) | m | 0/1.75 | ± 1 % | ||
| Barkirina binavkirî ya platforma xebatê | kg | 230 | - | ||
| Payload piştî platforma xebatê hate dirêj kirin | kg | 115 | - | ||
| Dema rakirina platforma xebatê | s | 15-30 | - | ||
| Kêmkirina dema platforma xebatê | s | 22-35 | - | ||
| Max.leza bezê li pozîsyona kêm. | km/h | ≥4 | - | ||
| Max.leza rêwîtiyê li bilindahiya bilind | km/h | ≥0.8 | - | ||
| Dereceya herî zêde | % | 25 | - | ||
| Goşeya hişyariya zirav (alî / pêş û paş) | ° | 1.5/3 | |||
| Motora hilgirtin / xebitandinê | Cins | - | - | - | |
| Hêza nirxandin | kW | 3.3 | - | ||
| Çêker | - | - | - | ||
| Pîl | Cins | - | T105/DT106 | - | |
| Woltî | v | 24 | - | ||
| Kanîn | Ah | 225 | - | ||
| Çêker | - | Trojan/Leoch | - | ||
| Modelên tire | - | Bê şop û hişk /305×100 | - | ||
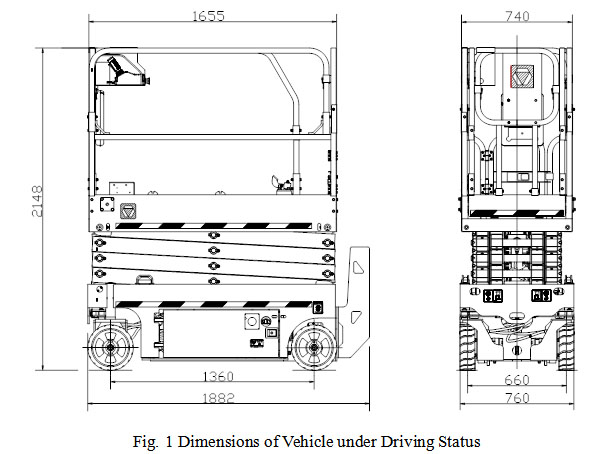
V. Dimensional Diagram of Vehicle in Running State
Pêvek: veavakirinên vebijarkî
(1) Pergala hişyariya barkirinê
(2) Çira xebatê ya platformê
(3) Bi boriya hewayê ya platforma xebatê ve girêdayî ye
(4) Bi dabînkirina hêza AC ya platforma xebatê ve girêdayî ye



