Platforma Operasyona Hewayî ya Destê Rast a GTBZ22S





I. Nêrîn û taybetmendiyên hilberê
GTBZ22S Destê rast û platforma operasyona hewayî ya xweser bi performansa berbiçav, bikêrhatî, dînamîk û xebata hêsan ronî dike.Ew di pîşesaziyê de bi kapasîteya hilgirtina herî zêde ya 340kg, bilindahî û mezinahiya xebitandinê ya bilind, cil û bergên ji bo avakirina barek mezin û qada xebatê ya berfireh pêşeng e.
[Awantaj û taybetmendî]
● Têkiliya paralel a dualî û milê teleskopîk dikare verastkirina dînamîk a navenda giraniya wesayîtê pêk bîne, û wesayîta tevahî aramtir bike.
● Bi 4WD, tîrêjên fireh ên derveyî rê û pergala hevsengiya eksê, makîne di ajotinê û adaptasyona rê de hêja ye.
● Teknolojiyên kontrolkirina zerfê yên pir-barkirî dikarin barkirinê di wextê rast de bişopînin, bi bandor ji boomê bikar bînin û performansa xebata wê di qeraxa pêşîn de bikin.
● Mekanîzmaya dirêjkirina hevsengiya otomatîkî ewlehiya mekanîzmaya dirêjkirinê baştir dike û jiyana karûbarê zincê pola dirêj dike.
● Pergala kontrola elektrîkê teknolojiyên kontrolê yên belavkirî yên li ser bingeha PLC û CAN-ê dipejirîne, bicîhkirina asta otomatê, giraniya bargiraniya platformê, çavdêriya dînamîkî û hişyariya xeletiyê.
II.Danasîna Parçeyên Sereke
1. Parçeya şasî
Veavakirinên sereke: 2WD, rêwerdana çar çerx, balansa eksê û tirên kefên perfusionê.
(1) Leza ajotinê ya herî zêde li 6km/h.
(2) Nota herî zêde li 45% -Max.asta di pîşesaziyê de
(3) Pergala hevsengiya Axle - pir zêde şiyana wesayitê ku di ser her rêyek dijwar re derbas dibe baştir dike.
(4) Kêmkera rêwîtiyê ya çêkirî ya ku motor û kêmker yek dike, tê sepandin û du leza ajotinê (leza bilind û leza kêm) têne peyda kirin da ku daxwazên ajotinê ya makîneyê di bin hawîrdorên cihêreng de bicîh bînin.Mekanîzmaya rêwîtiyê dema ku li ser zozanan digere fonksiyona xwe-frenkirinê vedigire û bi amûra klûbê ve tê saz kirin da ku di bûyera xeletiyê de vekêşanê hêsan bike.
2. Boom part
(1) Boom teleskopê ya 3-beş ya cylinderek teleskopêk + têl.
(2) Materyalên Boom - Boom ji pola hêza bilind tê wellandandin da ku ewlehiya sivik û bilind pêk bîne.
(3) Rawesta + bom bi hevdemî hildiweşe û bilind dibe, wê hilberînertir dike.
(3) Lihevhatina hêz-serhişkî - Ew hêz û hişkiya berbiçav a bomê garantî dike.
3. Parçeya Turntable
(1) Pîvana zivirî karibe 360° zivirîna domdar bike û ji bo sazkirina pêlên qefilandina veguheztinê bi du kun tê peyda kirin.
(2) Pergala hêzê - Motorên Perkins/Deutz bi pergala şok-derxistin û belavkirina germê ya xweşbînkirî ne.
(3) Mountkirina motora spin-out li çarçoweya wesayîtê tê pêçandin û dikare were rijandin, ji bo lênihêrîn û tamîrkirinê gihîştina motor û pêvekên wê hêsan dike.
4. Beşa platformê
(1) 2.4m×0.9m platforma xebata mezin.
(2) 160° platformê zivirî.
(3) Heta 340kg kapasîteya hilgirtinê.
(4) Pergala oto-astengkirina rêjeyî ya elektro-hîdraulîk dikaribû di wextê rast de goşeya platformê bişopîne, bi dînamîka wê astê bike.
5. Pergala hîdraulîk
(1) Pompeya girtî + pompeya guhêrbar: ya berê ji bo kontrolkirina pergala xebitandinê û ya paşîn ji bo kontrolkirina pergala bêkêmasî ya hîdrolîk ku rasterast bi motorê ve tê rêve kirin, tê bikar anîn, ji bilî pergala xebitandinê;
(2) Yekîneya hêza acîl a sazkirî - Ew dikare piştrast bike ku di bûyera xirabûna motorê an pompeya rûnê de bom dikare ji rewşa ajotinê were paşvekişandin.
(3) Pergala hîdrolîk a superstrukturê ji pergala zexta domdar a pompê ya guhêrbar e: li ser bingeha teknolojiyên kontrolê yên hevseng ên elektrîkî-hîdrolîk, makîneyê dikaribû qutkirina avahîsaziyê, avêtina boomê, paşvekêşîn / dirêjkirina bomê, hejandina xebatê pêk bîne. rawesta axaftevan;valveya sereke ya avahîsaziyê ji valeya pêvekirî ye;makîneyê bi radyatorê rûnê hîdrolîk ve hatî çêkirin.
(4) Pergala xebitandinê ji pergalek guhêrbar a girtî ye - celeb ajotina 4 × 4, ku di nav pêlavên bilez û leza kêm de têne dabeş kirin.Pergala hîdrolîk a jêrzemînê dikaribû hevsengkirina axê, û fonksiyonên rêvekirinê pêk bîne.
5. Pergala elektrîkê
(1) Teknolojiya kontrolkirina PLC - Yek kontrolker her yek ji bo gerok û platformê tê peyda kirin.Qutiyek kontrolê bi rêzê ji bo şens û platformê tê saz kirin da ku şasî, zivir, bom û platformê kontrol bikin.
(2) Tiştên kontrolê yên sereke - Pêş-germkirina motorê, destpêk, şewat, û kontrolkirina lezê;Zexta rûnê motorê, kontrolkirina germahiya sarkerê û hişyarî;Rêvebiriya şasiyê û kontrola ajotinê;Teqandina zivirî û lûfkirina boom û kontrolkirina teleskopê;Kontrola xistina platformê;Kontrolkirina barkirina platformê;Asta platformê.
(3) Rêbazên parastina ewlehiyê yên pirjimar - çavdêriya motor û destpêkirina parastinê;wesayît - hişyariya zirav;hişyariya zêde barkirinê;çavdêrîkirina lewazbûna têlên pola.
III.Veavakirina Parçeyên Sereke yên GTBZ22S
| S/N | Nav | Jimarî | Not |
| Makîne | 1 | Perkins/Yuchai | |
| Rêwîtiyê kêmker | 4 | OMNI/RR | |
| Motora rêwîtiyê | 4 | DAFOSS / Shengbang | |
| Pompeya girtî | 1 | REXROTH/Liyuan | |
| Yekîneya hêzê | 1 | BUCHER | |
| Koma valve ya platformê | 1 | Sant/Shengbang | |
| Koma valveya Turntable | 1 | ||
| Koma valveya kontrolê ya rêwîtiyê | 1 | ||
| Swing cylinder | 1 | HELAC / Weihai Liansheng | |
| Silindirê destê Crank | 1 | Chengdu Chenggang Amûrên Hîdraulîk Co., Ltd./XCMG Parçeyên Hîdraulîk Co., Ltd. | |
| Silindirê astîkirinê | 1 | ||
| Silindirê derrik | 1 | ||
| Silindirê teleskopî | 1 | ||
| Silindirê rêvekirinê | 2 | ||
| Balans cylinder | 2 | ||
| Radyatorê rûnê hîdrolîk | 1 | Yinlun | |
| Controller | 2 | XCMG | |
| Sensorê meyldariya zivirî | 1 | Shanghai Parker Hannifin | |
| Sensorê meyldariya platformê | 1 | Xuzhou Youwell | |
| Sensorê giraniyê | 1 | ||
| Joystick | 2 | DAFOSS | |
| Guhestina lingê | 1 | SUNS | |
| Hilgira rijandin | 1 | Ma'anshan Fangyuan | |
| Reduktorê şilkirinê | 1 | Xuzhou Keyuan | |
| Motora swing | 1 | Ningbo Zhongyi | |
| Dûlab | 4 | Laizhou Yishimai |
IV.Taybetmendiya Teknîkî ya Sereke ya GTBZ22S
| Şanî | Yekbûn | Parametre |
| yek.Dirêjahiya giştî ya makîneya bêkêmasî | mm | 10150 |
| b.Firehiya giştî ya makîneya bêkêmasî | mm | 2490 |
| c.Bilindahiya giştî | mm | 2800 |
| d.Wheelbase | mm | 2500 |
| Bilindahiya xebatê ya herî zêde | m | 24 |
| Bilindahiya platformê ya herî zêde | m | 22 |
| Rêjeya xebatê ya herî zêde | m | 18.3 |
| Giraniya hilgirtina herî zêde | kg | 230 (Bê sînor)/340 (Bê sînor) |
| Rêjeya luffing ya boom | ° | -5 ~ +75 |
| Goşeya zivirandinê ya zivirî | ° | 360 |
| Leza herî zêde ber bi paş ve | mm | 1550 |
| Mezinahiya platformê | mm | 2400×900 |
| Goşeya xistina platformê | ° | 160 |
| Giraniya giştî | kg | 12500 |
| Leza herî zêde ya rêwîtiyê | km/h | 6 |
| Radyoya zivirîna hindiktirîn | m | 6 |
| Kêmtirîn paqijkirina erdê | mm | 230 |
| Dereceya herî zêde | % | 45 |
| Specification of tire | - | 355/55D625 |
| Modela motorê | - | Perkins 404D-22TYuchai 4D24T00 |
| Hêza rêjeya motorê | kW/(r/min) | 43/(2600)48/(2700) |
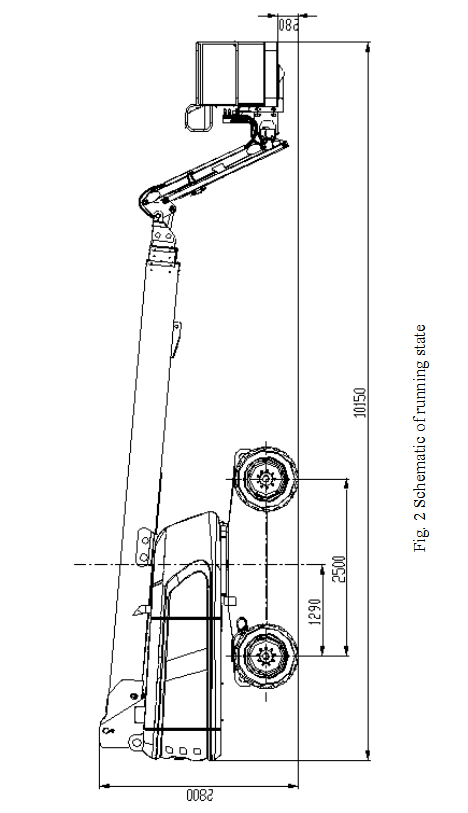
V. Safe Working Range Diagram of Machine
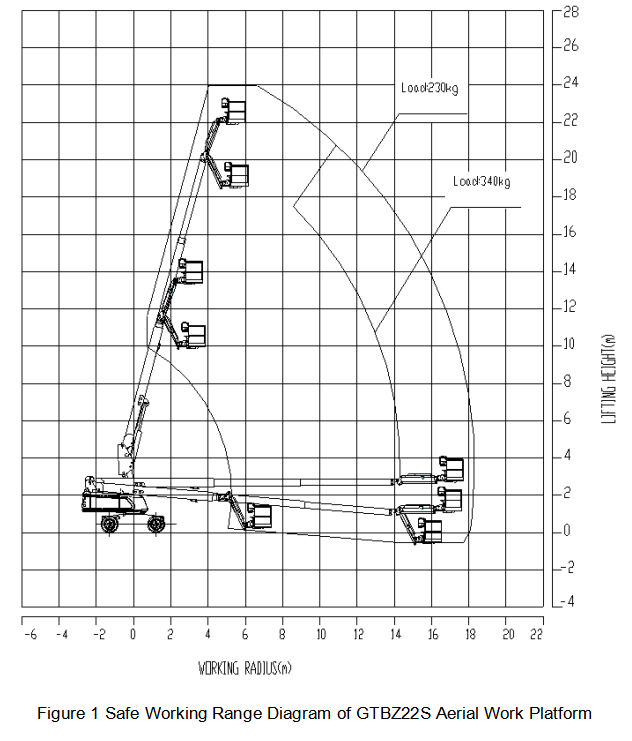
VI.Dimension Diagram Makîne di bin Rewşa ajotinê de